
从Tesla Optimus到宇树G1,人形机器人手部线束带来的压接挑战
就在本月,特斯拉确认第三代Optimus(也称Optimus V3)将于2026年夏季正式发布,其中灵巧手的新设计相当吸睛:50个致动器(每侧25个),每只手22自由度——比第二代智能手提升4.5倍。但作为行业内的人,我们更关注这双华丽“双手”皮肤下的秘密:在如此狭小的手掌空间里,密布着线束。这些线束就像机器人的“神经末梢”,传输着每一个触觉、每一份压力。如果连接不够稳固,机器人的动作就会变得“迟钝”甚至“颤抖”。今天,我们聊聊这些神经末梢背后的连接艺术

指尖下的“微观世界”
在机器人的世界里,线束连接从来不是简单的“把两根线接在一起”。随着灵巧手自由度的提升,连接空间被压缩到了极致。我们可以通过本月几款标志性的机器人设计,看看现在的技术前沿都在关注什么。
1. 那些极其微小的“安全感”:Molex Pico-Lock
参考Optimus V3的指尖传感器连接,像 Molex Pico-Lock(1.00mm 间距) 这类带锁扣的微型连接器,非常适合用于高频抓取场景下的传感器信号连接。
– 挑战所在: 这种端子的间距仅有一毫米,配合的是 AWG 32 或 34 的极细高柔线。
– 连接细节:这种端子的难点不在于“压得紧”,而在于“压得准”。由于自带微型锁扣,一旦压接处出现哪怕一点点的毛刺或形变,端子就无法顺滑地推入胶壳。这考验的不是力气,而是模具的“温柔”与精准。


2. 信号的“纯净度”保障:JST GH 系列
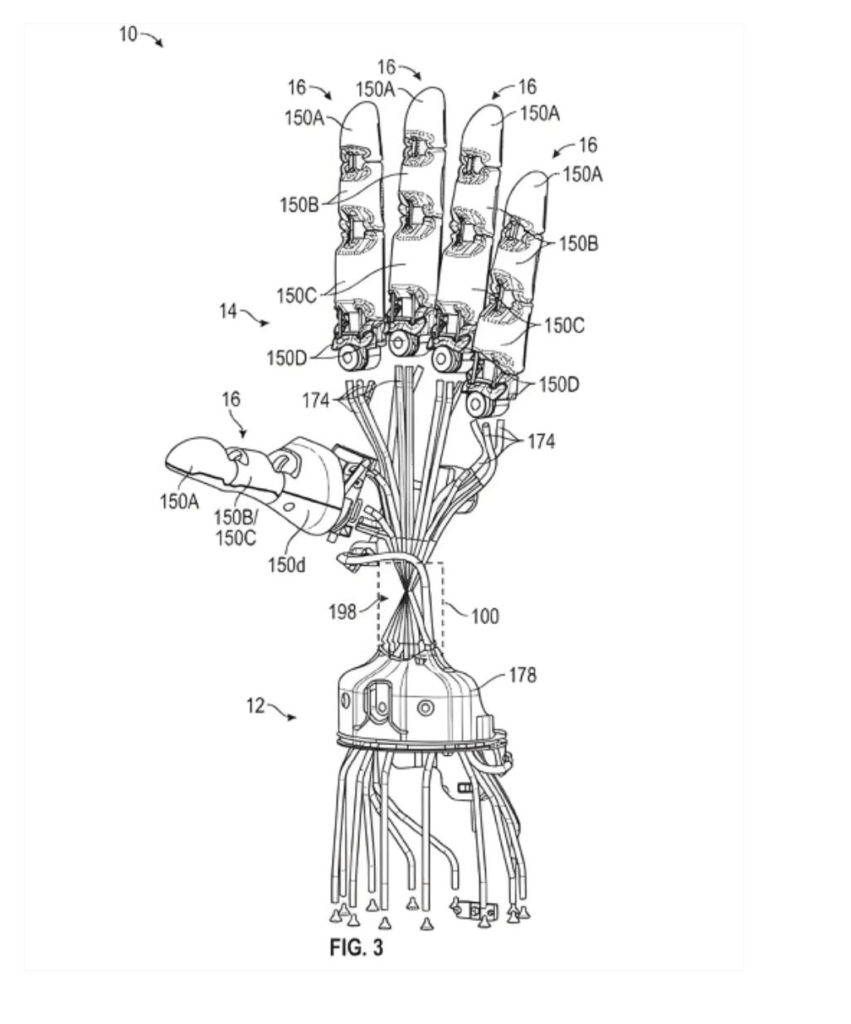
Figure 03 机器人在处理手部的复杂总线信号时,偏爱使用 JST GH(1.25mm 间距)。
– 挑战所在: 机器人运行过程中,电机产生的电磁干扰无处不在。为了信号纯净,线束通常带有屏蔽层。 – 连接细节:这种压接需要同时照顾到细弱的线芯和坚韧的屏蔽层。如果压接力度分布不均,屏蔽层处理不当,就会像收音机出现了杂音,导致机器人接收到的指令出现“偏差”。

3. 关节处的“韧性”考验:Hirose DF57
国产人形机器人领军者宇树 G1,在手部关节处大量使用了高度极低的 Hirose(广濑)DF57 系列。
– 挑战所在: 机器人的关节每天要摆动成千上万次。
– 连接细节: DF57 这种超薄端子对压接后的高度(Crimp Height)要求非常细腻。压得稍深一点,容易损伤铜丝导致折断;压得稍浅一点,接触电阻就会增加。这种分毫之间的平衡,是机器人长久运行的底气。


当连接变得“精细化”,我们需要什么样的工具?
说完了前端的连接器,作为线束加工的一方,我们深知在 2026 年的今天,传统的压接理念正在发生微妙的变化。我们总结了三个最让线束工厂“头疼”的环节:
1. 发丝般的线芯,经不起“粗鲁”对待
现在的传感器线缆,线芯细得几乎肉眼难辨。传统的两点式挤压,虽然也能压紧,但往往会造成线芯截面积的物理损伤。一旦线芯受损,导电性能和抗拉强度都会大打折扣。
2. “对不准”是量产的敌人 在 1.0mm
间距的微型端子面前,工人的手感和眼力开始面临极限。如果工具没有良好的引导机构,端子入位稍有偏斜,一整排线束可能就要报废。
3. “看不见”的隐患最伤人
在机器人这种高精密设备上,很多压接不良是隐性的。刚出厂时一切正常,但在高频弯折几百小时后,接触电阻变大导致传感器报错。这种“延迟爆发”的故障,往往是由于压接过程中的压力不稳造成的。
IWISS的答卷——让精密连接更简单
面对 2026 年这些有趣但也棘手的技术挑战,IWISS并没有追求华而不实的口号,而是回归工具的本质:稳定、顺手、可预见。
1. 精密定位压接
针对机器人常用的 Molex 和 JST微型端子,我们重新设计了平行压接钳口,保证压力均匀更好地压接小端子,线切割工艺保证钳口精度。

2. 四芯轴点压技术
针对超细线缆与航空插针,我们推行了更为温和的四芯轴均匀压接技术。它不再是生硬地从上下两侧挤压,而是从四个方向同步受力。这种方式能把线芯受损的可能性降到最低,让线缆在压接后保持自然的圆润状态,不仅导电更好,也更耐弯折。

我们始终认为:再前沿的科技,最终也要通过扎实的物理连接来实现。
我们不追求在每一篇文章里都用上“革命性”这样的词汇。我们更愿意在 2026 年的工厂里,听您说一句:“这把钳子,压得挺准,用得顺手。”
这就是我们对连接未来最好的回馈。
如您有任何咨询、采购等需求,都可联系IWISS官方客服。
